Principal Investigator: Dr. Fu ZHANG (Assistant Professor from Department of Mechanical Engineering)
This project is showcased in the second exhibition – Digitization in Innovation Wing Two
About the scholar
Dr. Fu ZHANG
Research interests: • Robotics and Control • Unmanned Aerial Vehicles (UAVs) • Simultaneous localization and mapping (SLAM) Email: fuzhang@hku.hk Website: https://mars.hku.hk
Project information
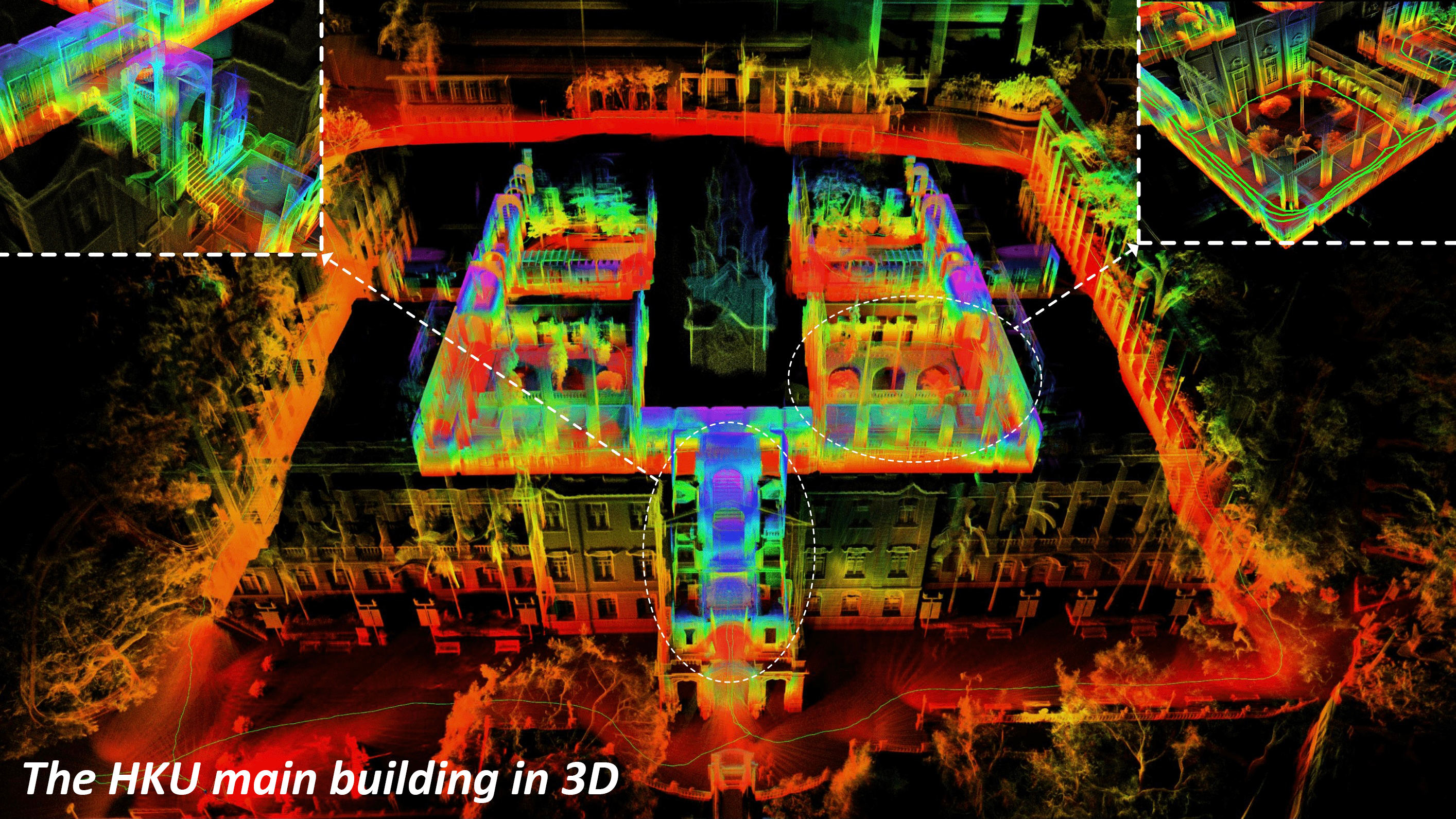
The LiDAR Camera fusion captures 3D space in real-time, opening up the portal into the virtual world. The built model can be used in real scene games, virtual campus tour, metaverse, and more! However, existing products in the market are costly, and the working process is not only slow but also complicated.
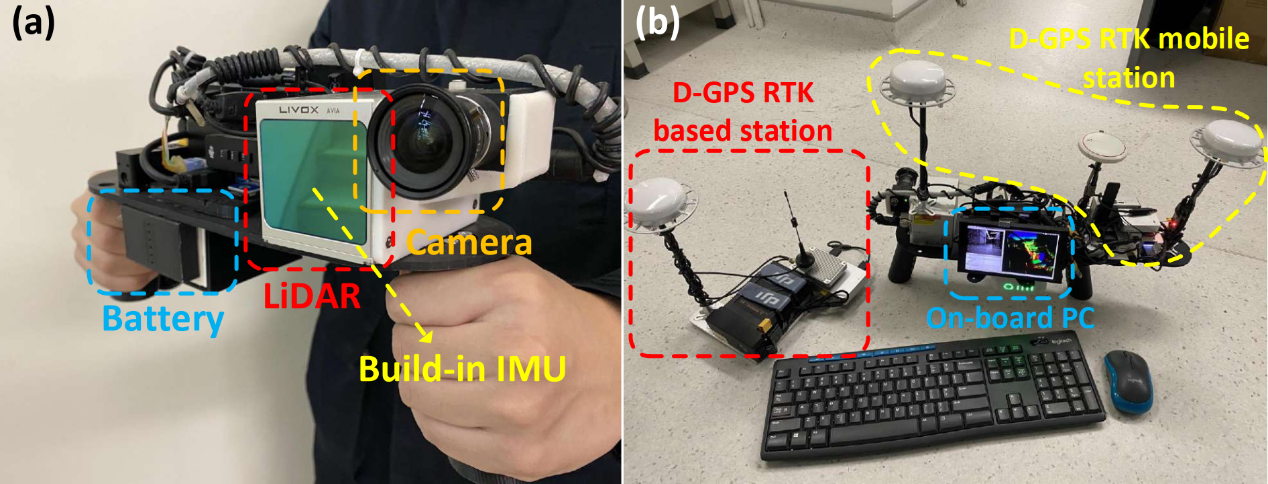
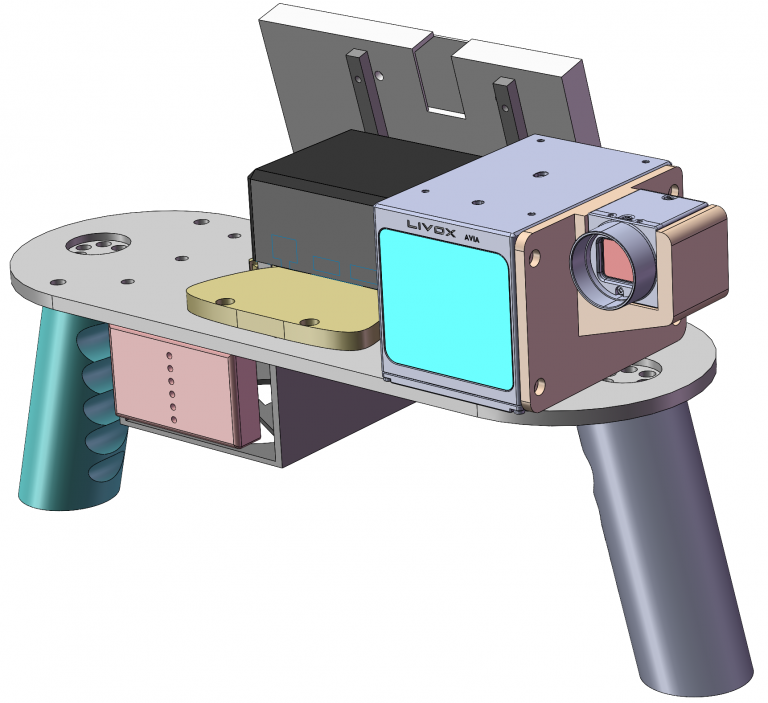
Dr. Zhang’s research team has developed a LiDAR-based simultaneous localization and mapping (SLAM) system that can be carried by human or a robot (e.g., UAV) to continuously explore the surrounding environment and build its 3D map, with much lower cost and higher mapping efficiency.
Characteristics of the developed LiDAR system • It can reconstruct a dense, 3D, RGB-colored point cloud of the environment in real-time. • It is robust even in texture-less environments, as the process requires no salient visual feature in the environment and saves the corresponding processing time. • It only has a low drift that 0.16 meters in translation and 3.9 degrees in rotation after traveling up to 1.5 kilometers.
Contribution To share the findings and make contributions to the community, the preliminary codes, software utilities and the mechanical design have been released online.
Project video
Project images
Achievement of the Project
Enquiry / Feedback
Please feel free to give your enquiry / feedbacks to the research team by filling the form (https://forms.gle/JV59N47nTj19ndYz6). Thank you!